
About Me
I am a Ph.D. student in Computer Sciences at the WISION Lab, University of Wisconsin–Madison, advised by Prof. Mohit Gupta. My research interests include computational imaging, computer vision and statistical signal processing. Currently, I am working on sensor fusion for robotics applications.
Before that, I worked for LG Innotek Company developing direct Time-of-Flight (dToF) SPAD/SiPM LiDARs DSP software.
I obtained my M.S. degree in Mechanical Engineering at Korea Advanced Institute of Science and Technology (KAIST), under the supervision of Prof. Yong-Hwa Park. I did my B.S. in Mechanical Engineering at Yonsei University.
Education

University of Wisconsin–Madison, Madison, WI, USA Ph.D. in Computer Sciences
Aug. 2025 - Present

KAIST, Daejeon, Republic of Korea M.S. in Mechanical Engineering
Sep. 2021 - Aug. 2023
Yonsei University, Seoul, Republic of Korea B.S. in Mechanical Engineering - Military Service (2015-2017)
Mar. 2014 - Aug. 2021
Publications
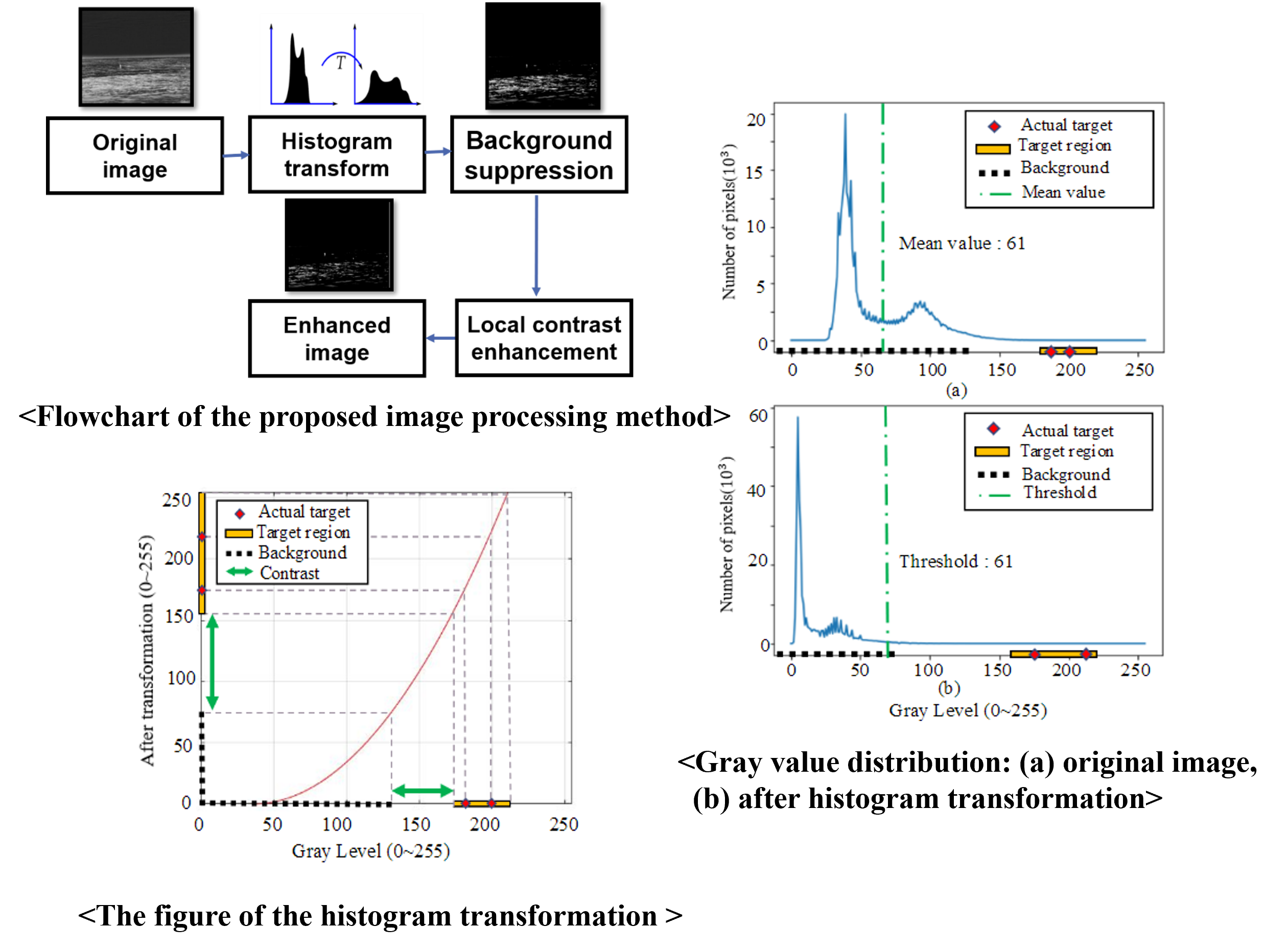
Infrared Small Object Detection Based on Histogram Transformation
Sungjin Cheong, Wonho Jung, Yong-Hwa Park
Conference of The Korean Society of Mechanical Engineers, (2022)
[Link]
Sungjin Cheong, Wonho Jung, Yong-Hwa Park
Conference of The Korean Society of Mechanical Engineers, (2022)
[Link]

Educational Content for Autonomous Driving with CARLA
Divine Technology Inc., Seoul, Republic of Korea
Achieved Outcomes: Produced online educational material and corresponding CARLA simulation practice code targeted to undergraduate and graduate school students, consisting of perception, decision, and control.
(Role: Camera, LiDAR perception part including lane detection, calibration, 2D/3D object detection, tracking etc.)
[Link]
Divine Technology Inc., Seoul, Republic of Korea
Achieved Outcomes: Produced online educational material and corresponding CARLA simulation practice code targeted to undergraduate and graduate school students, consisting of perception, decision, and control.
(Role: Camera, LiDAR perception part including lane detection, calibration, 2D/3D object detection, tracking etc.)
[Link]
Radar, LiDAR, and Camera Sensor Integrated Platform
LG Innotek Inc., Seoul, Republic of Korea
Achieved Outcomes: Develop integrated automotive sensors software platform.
(Role: (Full) 3D data processing, LiDAR noise filtering, Human & Object tracking algorithm, (Partly) Integrated sensor setup in vehicle, Viewer GUI)
[Link]
LG Innotek Inc., Seoul, Republic of Korea
Achieved Outcomes: Develop integrated automotive sensors software platform.
(Role: (Full) 3D data processing, LiDAR noise filtering, Human & Object tracking algorithm, (Partly) Integrated sensor setup in vehicle, Viewer GUI)
[Link]
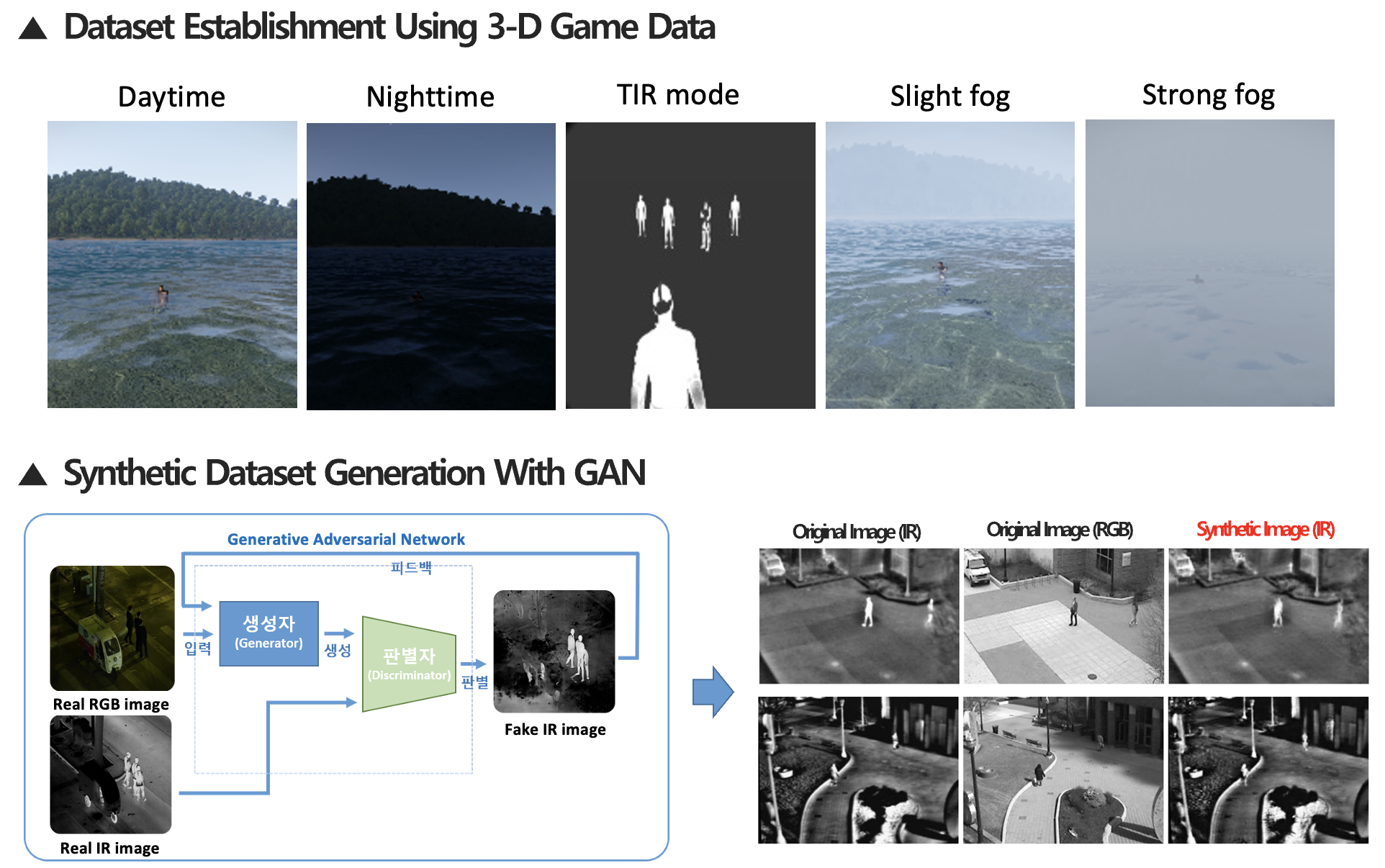
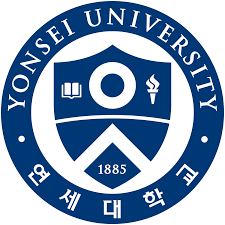
Infrared Monitoring AI System For Maritime Rescue
Korean Coast Guard, Incheon, Republic of Korea
Achieved Outcomes: Designed thermal-infrared target detection system specified for unmanned coast guard boats for maritime rescue search tasks.
(Role: Project leader, Dataset acquisition, Experiment, Overall framework design)
[Details]
Korean Coast Guard, Incheon, Republic of Korea
Achieved Outcomes: Designed thermal-infrared target detection system specified for unmanned coast guard boats for maritime rescue search tasks.
(Role: Project leader, Dataset acquisition, Experiment, Overall framework design)
[Details]
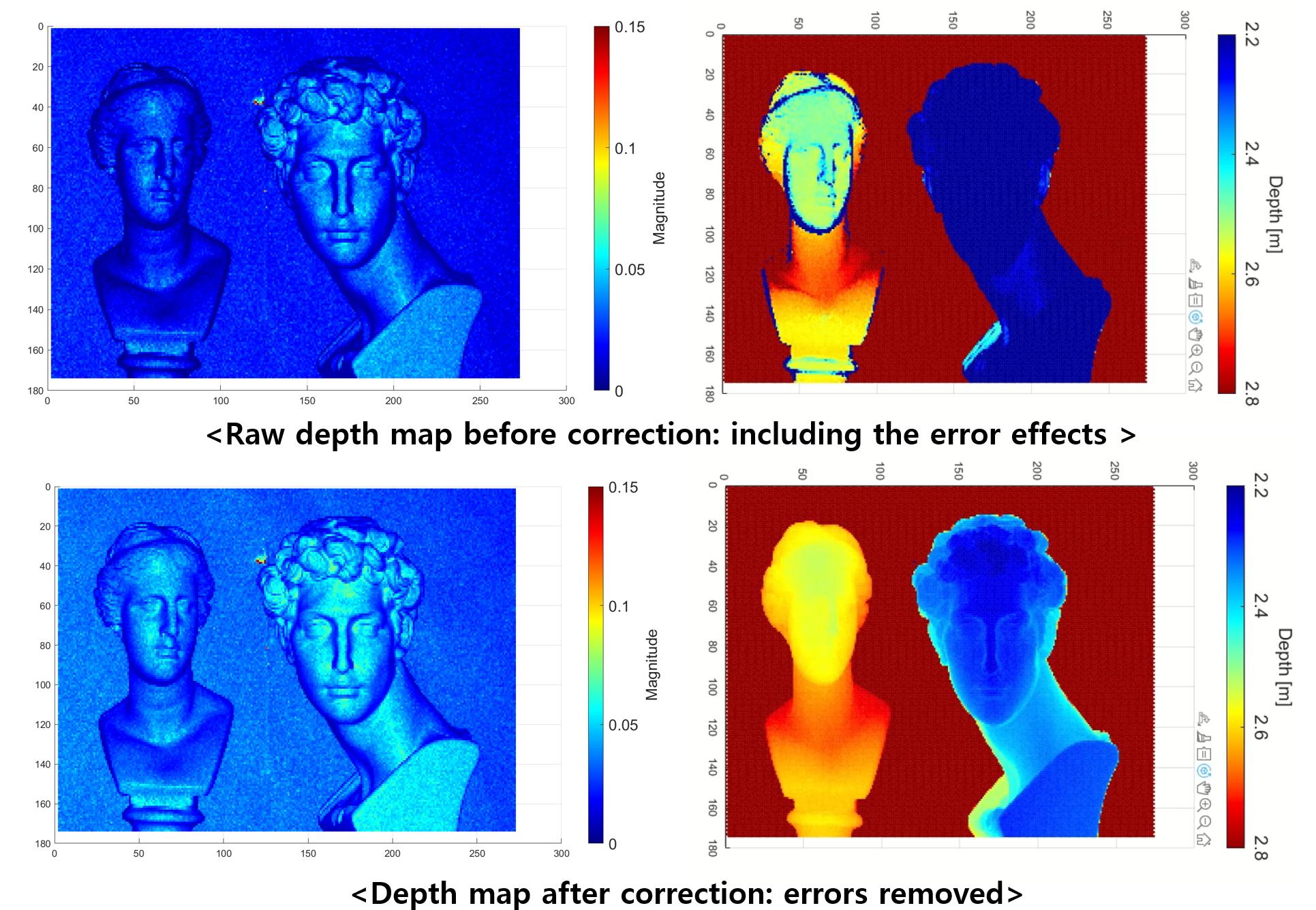
iToF Scanning LiDAR Platform and Its Application Software
Intek Plus Inc., Daejon, Republic of Korea
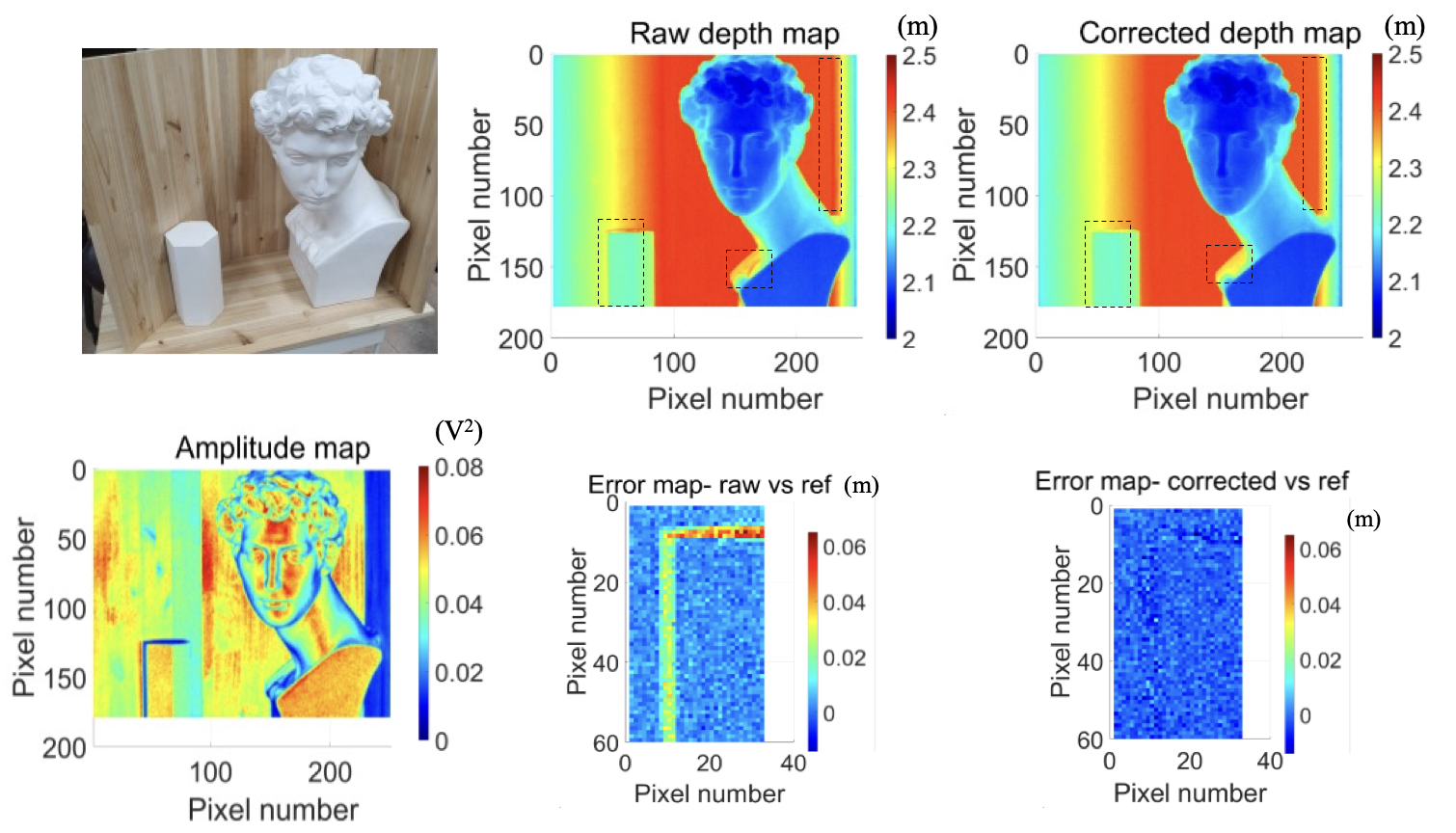
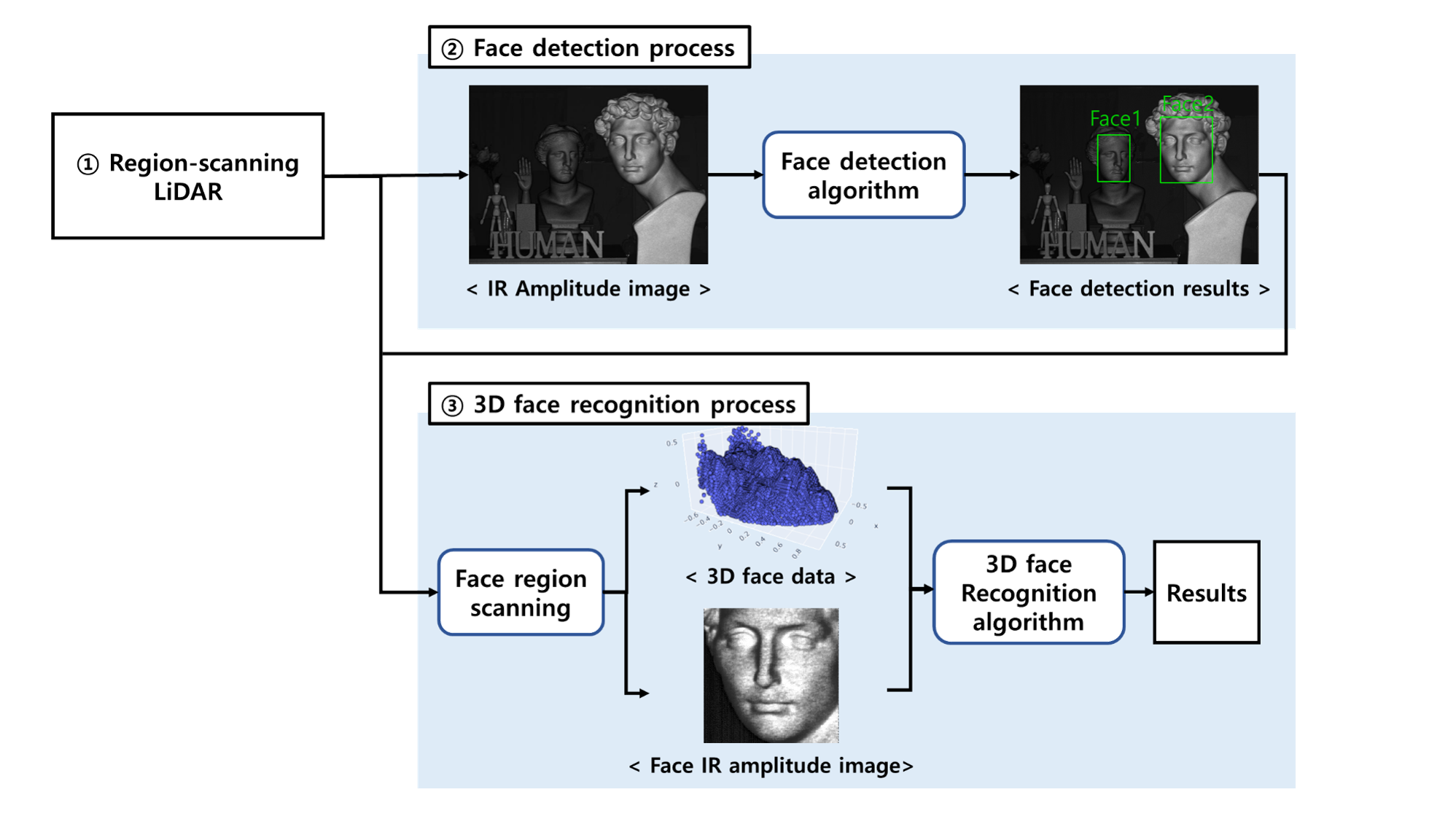
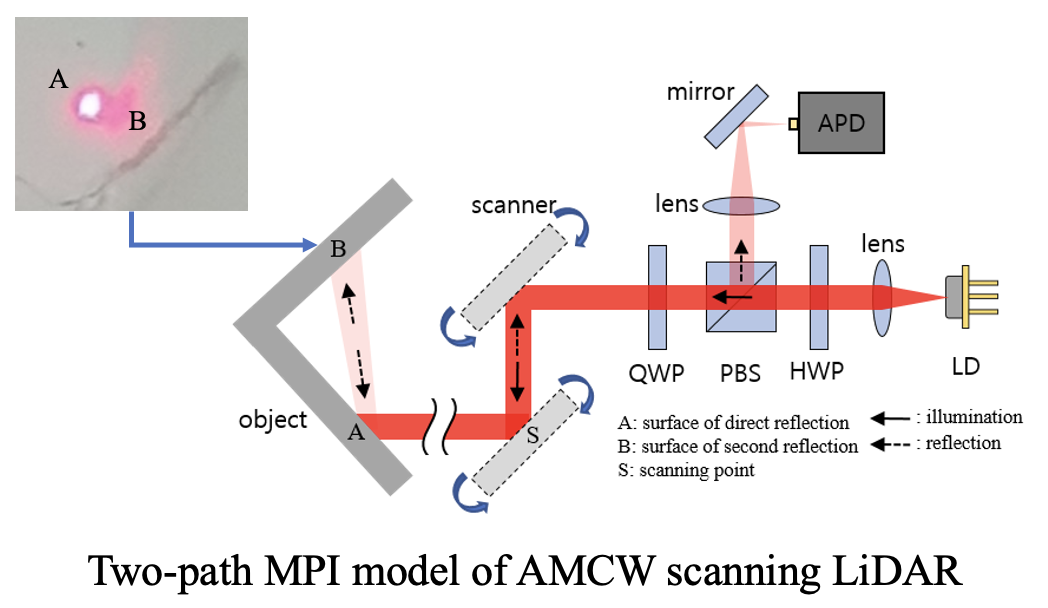
Achieved Outcomes: Proposed miniaturized indirect time-of-flight AMCW LiDAR system and its application software tailored to driver monitoring system (DMS) and highly precise 3D scanner.
(Role: (Full) 3D computer vision, (Partly) Optical system design & Signal processing)
[Details]
Intek Plus Inc., Daejon, Republic of Korea
Achieved Outcomes: Proposed miniaturized indirect time-of-flight AMCW LiDAR system and its application software tailored to driver monitoring system (DMS) and highly precise 3D scanner.
(Role: (Full) 3D computer vision, (Partly) Optical system design & Signal processing)
[Details]