
About Me
I am a Ph.D. student in Computer Sciences at the WISION Lab at the University of Wisconsin–Madison, advised by Prof. Mohit Gupta. My research focuses on computational imaging and computer vision, with an emphasis on:
- RGB + low-cost ToF sensor fusion for robot vision (multi-modal depth/semantic estimation, mapping, tracking)
- VLMs for open-vocabulary robot tasks (grounding language queries in 2D/3D, zero-shot semantic reasoning)
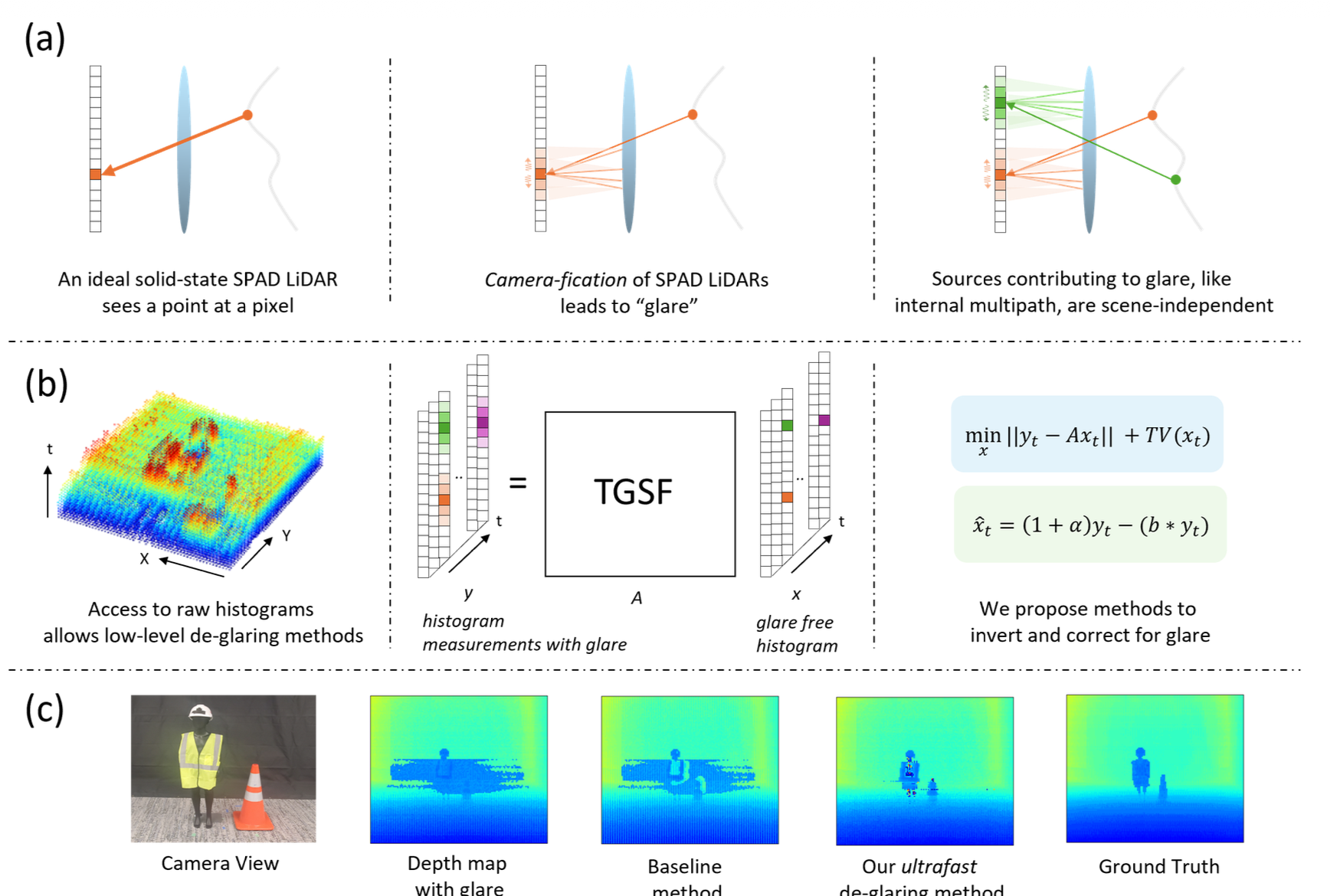
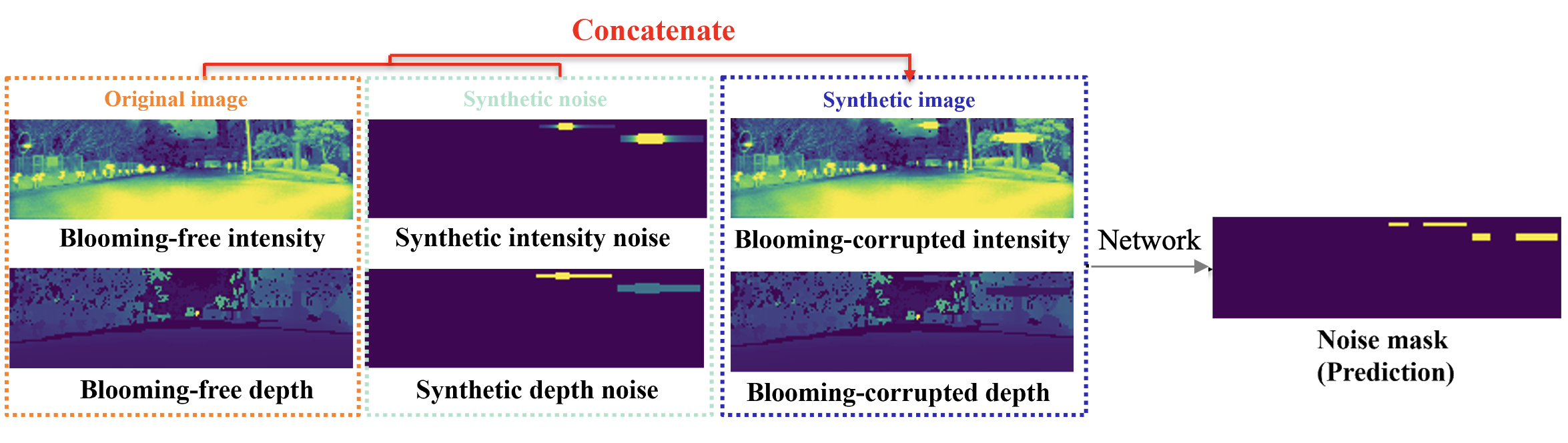
- ToF/LiDAR computational imaging (denoising, signal processing, robust depth under low SNR, stray light/blooming/MPI)
- Physics- and learning-based modeling of ToF measurements (histogram/correlation-domain formulations, simulation-driven evaluation)
Previously, I worked at LG Innotek developing direct Time-of-Flight (dToF) signal and image processing algorithms.
I received my M.S. in Mechanical Engineering from Korea Advanced Institute of Science and Technology (KAIST), advised by Prof. Yong-Hwa Park, and my B.S. in Mechanical Engineering from Yonsei University.
You can download my CV (PDF).
Education

University of Wisconsin–Madison, Madison, WI, USA Ph.D. in Computer Sciences
Aug. 2025 - Present

KAIST, Daejeon, Republic of Korea M.S. in Mechanical Engineering
Sep. 2021 - Aug. 2023
Yonsei University, Seoul, Republic of Korea B.S. in Mechanical Engineering - Military Service (2015-2017)
Mar. 2014 - Aug. 2021
Publications
Infrared Small Object Detection Based on Histogram Transformation
Sungjin Cheong, Wonho Jung, Yong-Hwa Park
Conference of The Korean Society of Mechanical Engineers, (2022)
[Link]
Sungjin Cheong, Wonho Jung, Yong-Hwa Park
Conference of The Korean Society of Mechanical Engineers, (2022)
[Link]
Past Projects

Educational Content for Autonomous Driving with CARLA
Divine Technology Inc., Seoul, Republic of Korea
Achieved Outcomes: Produced online educational material and corresponding CARLA simulation practice code targeted to undergraduate and graduate school students, consisting of perception, decision, and control.
(Role: Camera, LiDAR perception part including lane detection, calibration, 2D/3D object detection, tracking etc.)
[Link]
Divine Technology Inc., Seoul, Republic of Korea
Achieved Outcomes: Produced online educational material and corresponding CARLA simulation practice code targeted to undergraduate and graduate school students, consisting of perception, decision, and control.
(Role: Camera, LiDAR perception part including lane detection, calibration, 2D/3D object detection, tracking etc.)
[Link]
Radar, LiDAR, and Camera Sensor Integrated Platform
LG Innotek Inc., Seoul, Republic of Korea
Achieved Outcomes: Develop integrated automotive sensors software platform.
(Role: (Full) 3D data processing, LiDAR noise filtering, Human & Object tracking algorithm, (Partly) Integrated sensor setup in vehicle, Viewer GUI)
[Link]
LG Innotek Inc., Seoul, Republic of Korea
Achieved Outcomes: Develop integrated automotive sensors software platform.
(Role: (Full) 3D data processing, LiDAR noise filtering, Human & Object tracking algorithm, (Partly) Integrated sensor setup in vehicle, Viewer GUI)
[Link]
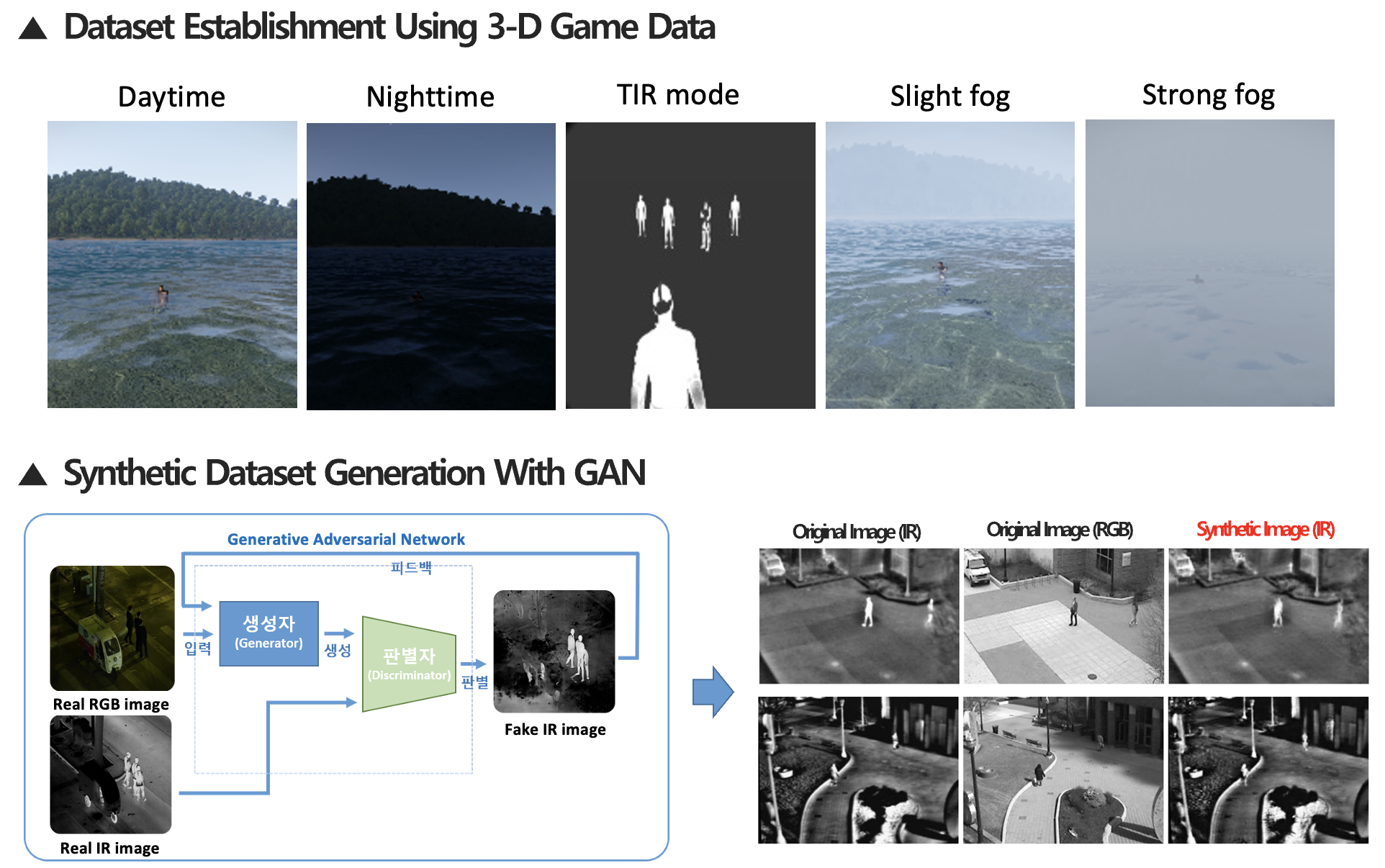
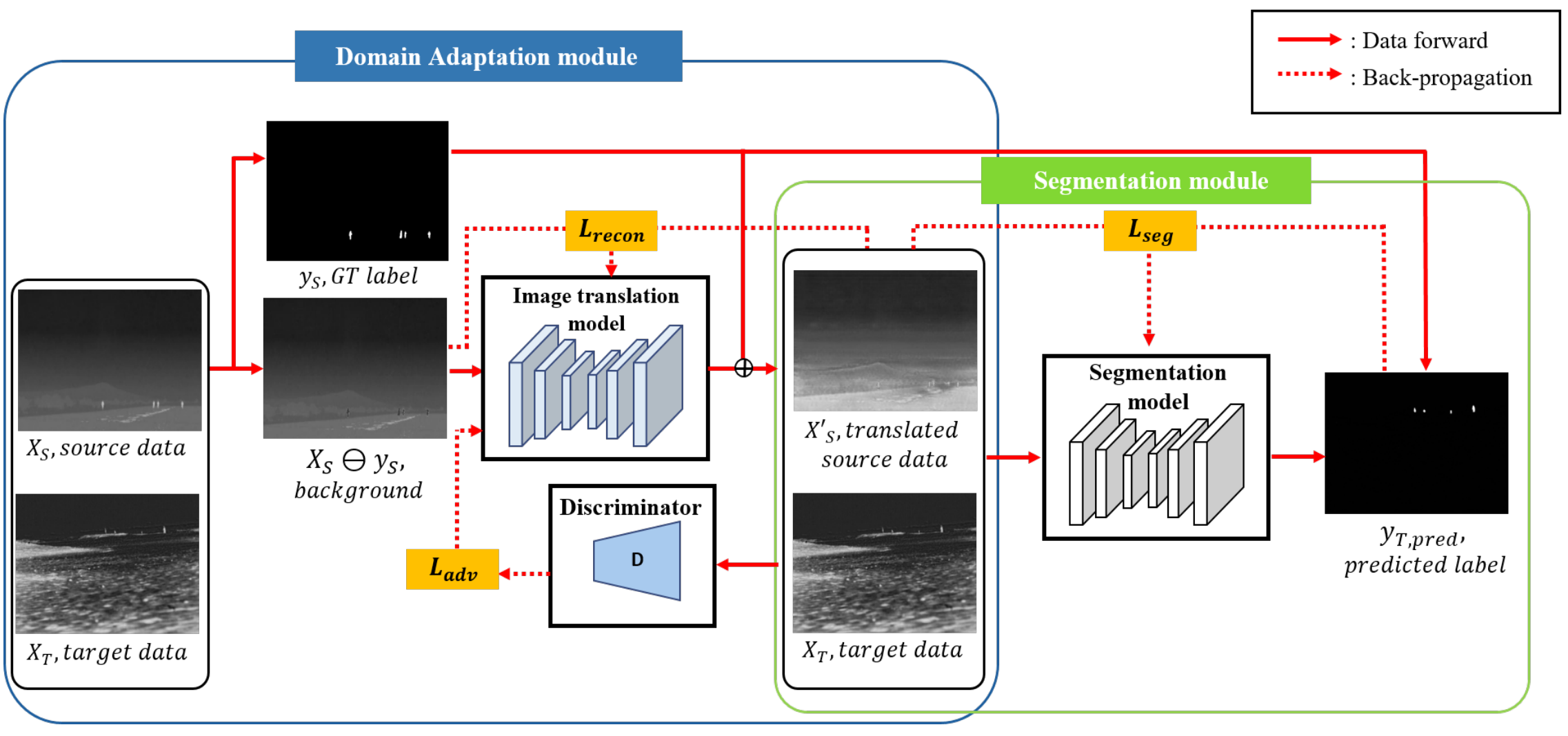
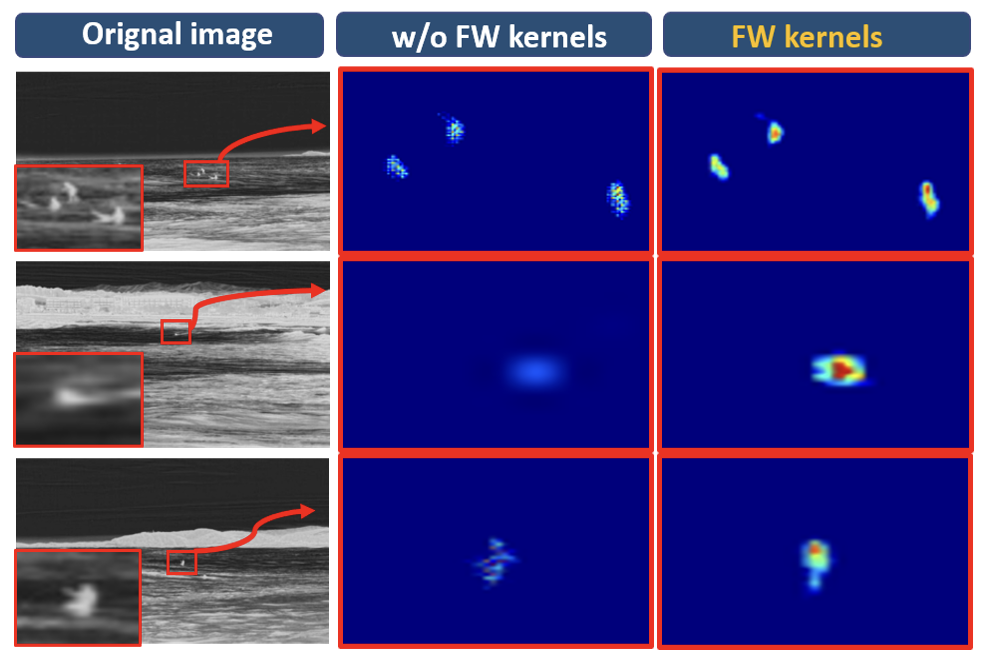
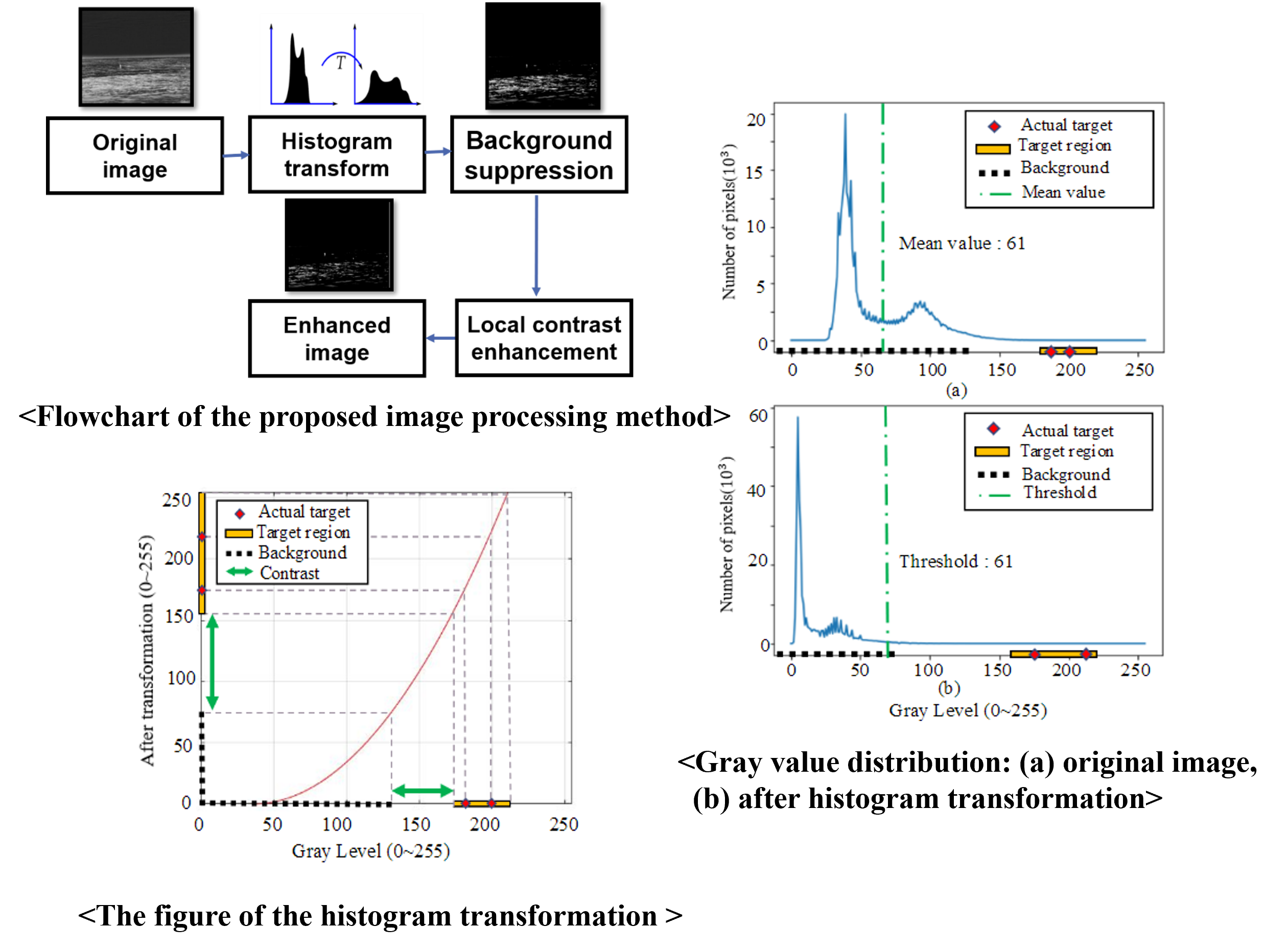
Infrared Monitoring AI System For Maritime Rescue
Korean Coast Guard, Incheon, Republic of Korea
Achieved Outcomes: Designed thermal-infrared target detection system specified for unmanned coast guard boats for maritime rescue search tasks.
(Role: Project leader, Dataset acquisition, Experiment, Overall framework design)
[Details]
Korean Coast Guard, Incheon, Republic of Korea
Achieved Outcomes: Designed thermal-infrared target detection system specified for unmanned coast guard boats for maritime rescue search tasks.
(Role: Project leader, Dataset acquisition, Experiment, Overall framework design)
[Details]
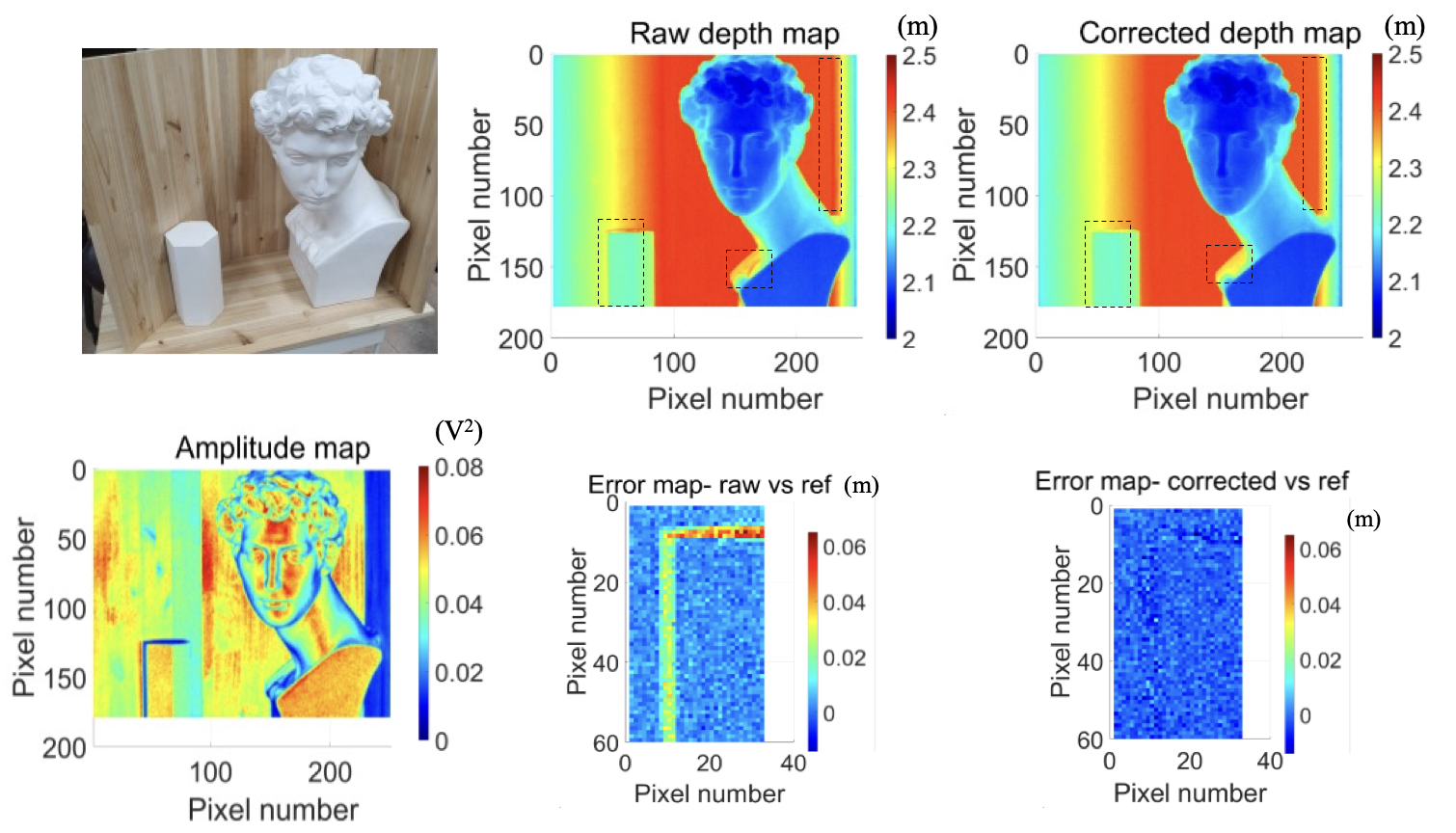
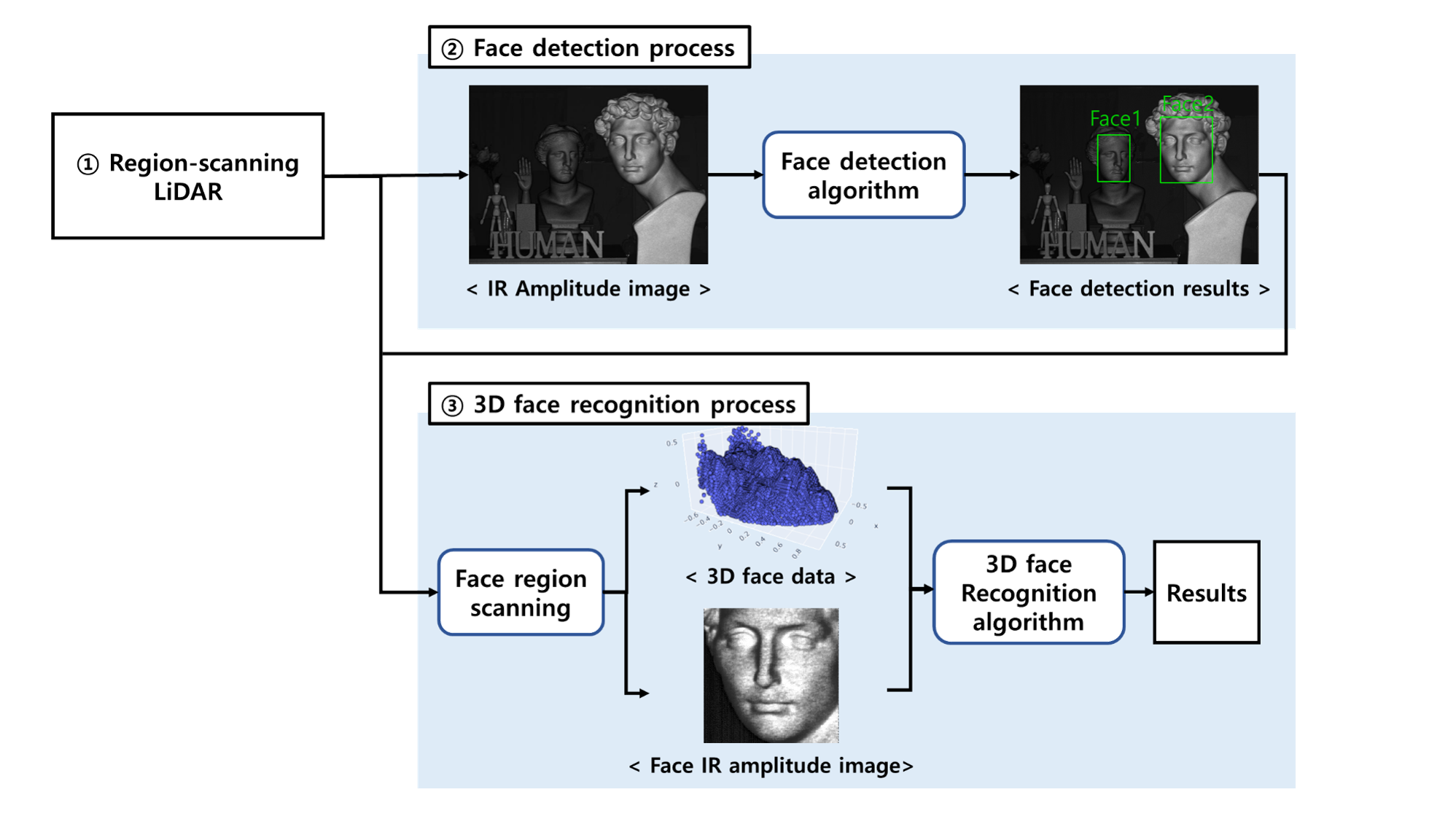
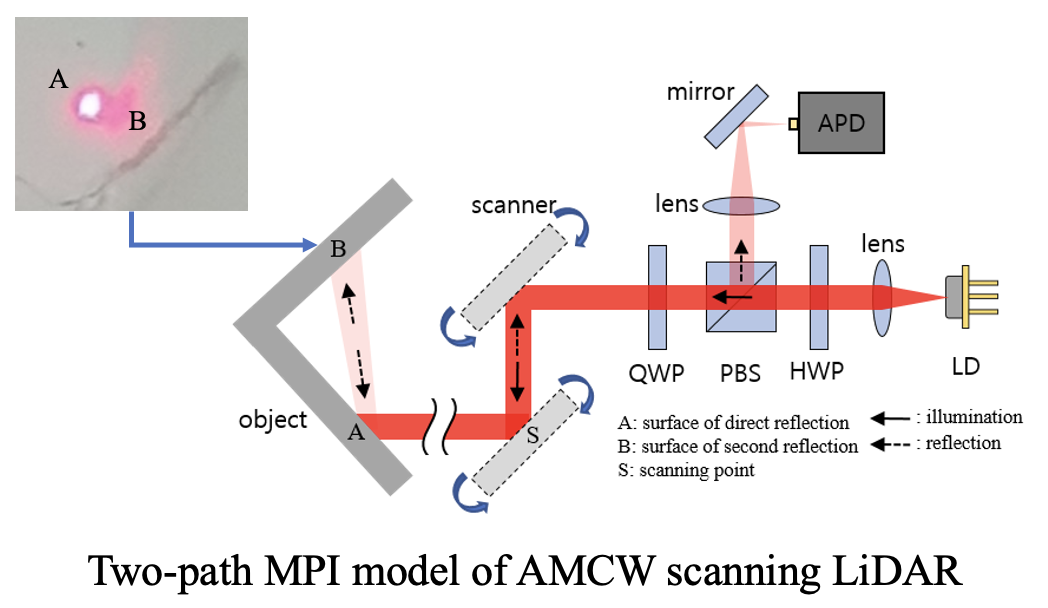
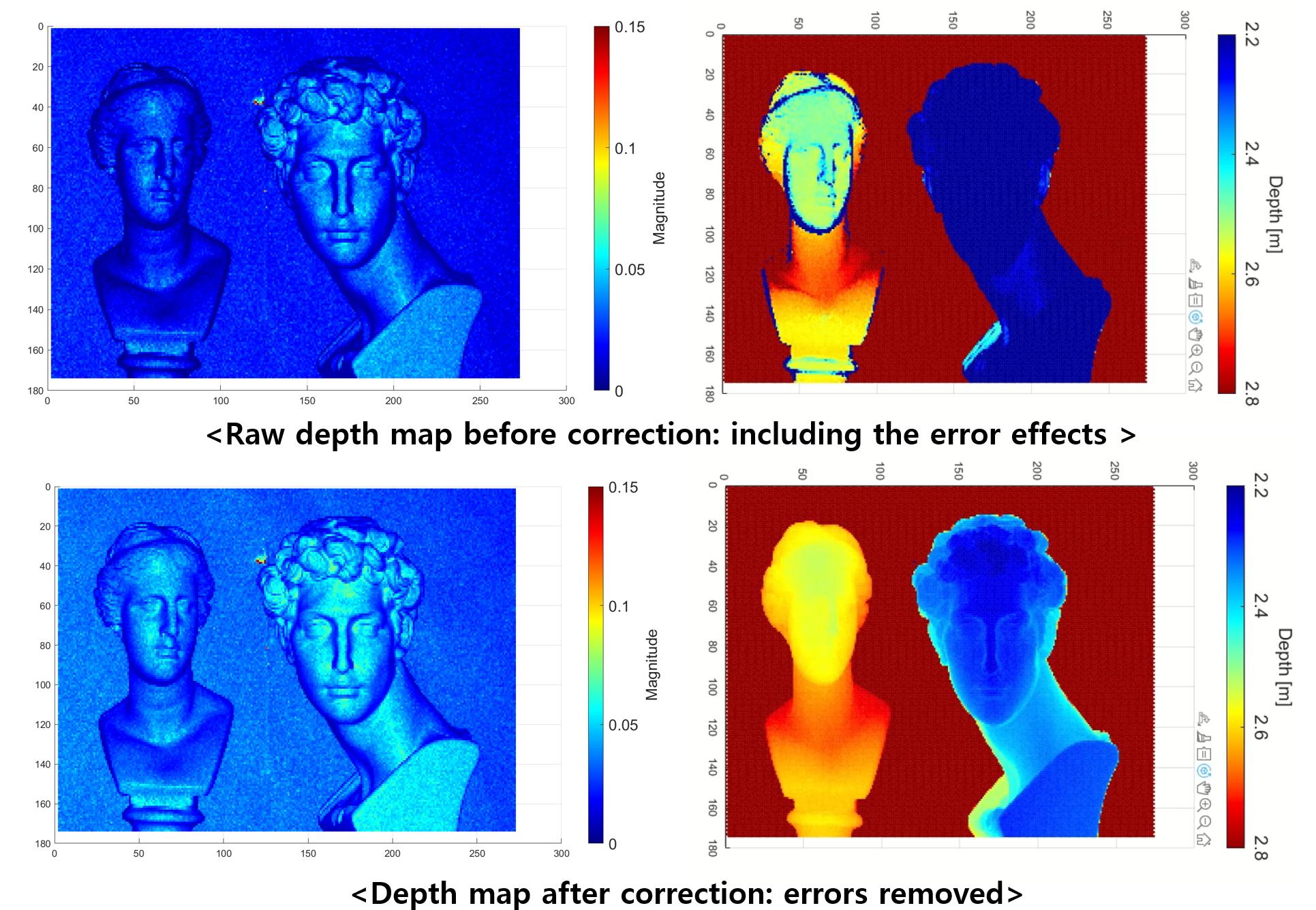
iToF Scanning LiDAR Platform and Its Application Software
Intek Plus Inc., Daejon, Republic of Korea
Achieved Outcomes: Proposed miniaturized indirect time-of-flight AMCW LiDAR system and its application software tailored to driver monitoring system (DMS) and highly precise 3D scanner.
(Role: (Full) 3D computer vision, (Partly) Optical system design & Signal processing)
[Details]
Intek Plus Inc., Daejon, Republic of Korea
Achieved Outcomes: Proposed miniaturized indirect time-of-flight AMCW LiDAR system and its application software tailored to driver monitoring system (DMS) and highly precise 3D scanner.
(Role: (Full) 3D computer vision, (Partly) Optical system design & Signal processing)
[Details]